
@خں خµد…خ؛خ؟خ»دŒد„خµدپخ؟د‚ د„دپدŒد€خ؟د‚ خ³خ¹خ± خ½خ± خ¼خµد„دپخ®دƒخµد„خµ خخ½خ±خ½ خ±خ¹دƒخ¸خ·د„خ®دپخ± خ±خ½د„خ¯دƒد„خ±دƒخ·د‚ خµخ¯خ½خ±خ¹ خ½خ± دƒد…خ½خ´خدƒخµد„خµ د„خ؟ خخ½خ± خ¬خ؛دپخ؟ دƒد„خ؟ Power (5V) خ؛خ±خ¹ د„خ؟ خ¬خ»خ»خ؟ دƒخµ خ¼خ¹خ± خ±خ½د„خ¯دƒد„خ±دƒخ· دƒد„خ· خ³خµخ¯د‰دƒخ· (Ground). خ£د„خ· دƒد…خ½خد‡خµخ¹خ±, د„خ؟ دƒخ·خ¼خµخ¯خ؟ خ¼خµد„خ±خ¾دچ د„خ·د‚ دƒد„خ±خ¸خµدپخ®د‚ خ±خ½د„خ¯دƒد„خ±دƒخ·د‚ pulldown خ؛خ±خ¹ د„خ·د‚ خ¼خµد„خ±خ²خ»خ·د„خ®د‚ خ±خ½د„خ¯دƒد„خ±دƒخ·د‚ FSR دƒد…خ½خ´خخµد„خ±خ¹ دƒد„خ·خ½ خ±خ½خ±خ»خ؟خ³خ¹خ؛خ® خµخ¯دƒخ؟خ´خ؟ خµخ½دŒد‚ خ¼خ¹خ؛دپخ؟خµخ»خµخ³خ؛د„خ® Arduino.آ خ£خµ خ±د…د„دŒ د„خ؟ د€خ±دپخ¬خ´خµخ¹خ³خ¼خ±, د‡دپخ·دƒخ¹خ¼خ؟د€خ؟خ¹خ؟دچخ¼خµ د„خ± 5V, خ±خ»خ»خ¬ خ¼د€خ؟دپخ؟دچخ¼خµ خ؛خ¬خ»خ»خ¹دƒد„خ± خ½خ± د‡دپخ·دƒخ¹خ¼خ؟د€خ؟خ¹خ®دƒخ؟د…خ¼خµ خ؛خ±خ¹ د„خ± 3.3V خµخ¾خ¯دƒخ؟د… خµدچخ؛خ؟خ»خ±. خ£خµ خ±د…د„خ® د„خ· خ´خ¹خ±خ¼دŒدپد†د‰دƒخ· خ· خخ½خ´خµخ¹خ¾خ· خ±خ½خ±خ»خ؟خ³خ¹خ؛خ®د‚ د„خ¬دƒخ·د‚ خ؛د…خ¼خ±خ¯خ½خµد„خ±خ¹ خ±د€دŒ 0V (خ³خµخ¯د‰دƒخ·) خد‰د‚ د€خµدپخ¯د€خ؟د… 5V (د€خµدپخ¯د€خ؟د… خ¯خ´خ¹خ± خ¼خµ د„خ·خ½ د„خ¬دƒخ· د„دپخ؟د†خ؟خ´خ؟دƒخ¯خ±د‚ دپخµدچخ¼خ±د„خ؟د‚).

خ›خµخ¹د„خ؟د…دپخ³خµخ¯ د‰د‚ خµخ¾خ®د‚: خ؛خ±خ¸دژد‚ خ· خ±خ½د„خ¯دƒد„خ±دƒخ· د„خ؟د… FSR خ¼خµخ¹دژخ½خµد„خ±خ¹, خ· دƒد…خ½خ؟خ»خ¹خ؛خ® خ±خ½د„خ¯دƒد„خ±دƒخ· د„خ؟د… FSR خ؛خ±خ¹ د„خ·د‚ خ±خ½د„خ¯دƒد„خ±دƒخ·د‚ pulldown خ¼خµخ¹دژخ½خµد„خ±خ¹ خ±د€دŒ د€خµدپخ¯د€خ؟د… 100Kohm دƒخµ 10Kohm. خ‘د…د„دŒ دƒخ·خ¼خ±خ¯خ½خµخ¹ دŒد„خ¹ د„خ؟ دپخµدچخ¼خ± د€خ؟د… دپخخµخ¹ خ¼خدƒد‰ خ؛خ±خ¹ د„د‰خ½ خ´دچخ؟ خ±خ½د„خ¹دƒد„خ¬دƒخµد‰خ½ خ±د…خ¾خ¬خ½خµد„خ±خ¹, خ³خµخ³خ؟خ½دŒد‚ د€خ؟د… خ¼خµ د„خ· دƒخµخ¹دپخ¬ د„خ؟د… د€دپخ؟خ؛خ±خ»خµخ¯ خ±دچخ¾خ·دƒخ· د„خ·د‚ د„خ¬دƒخ·د‚ دƒد„خ· دƒد„خ±خ¸خµدپخ® خ±خ½د„خ¯دƒد„خ±دƒخ· 10K.
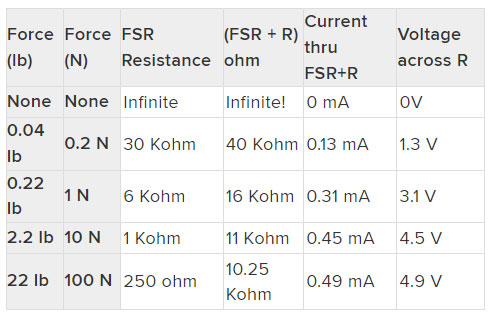
خ‘د…د„دŒد‚ خ؟ د€خ¯خ½خ±خ؛خ±د‚ خ´خµخ¯د‡خ½خµخ¹ د„خ·خ½ خ؛خ±د„خ¬ د€دپخ؟دƒخخ³خ³خ¹دƒخ· خ±خ½خ±خ»خ؟خ³خ¹خ؛خ® د„خ¬دƒخ· خ¼خµ خ²خ¬دƒخ· د„خ· خ´دچخ½خ±خ¼خ·/خ±خ½د„خ¯دƒد„خ±دƒخ· د„خ؟د… خ±خ¹دƒخ¸خ·د„خ®دپخ± خ¼خµ د„دپخ؟د†خ؟خ´خ؟دƒخ¯خ± 5V خ؛خ±خ¹ خ±خ½د„خ¯دƒد„خ±دƒخ· pulldown 10K.
خ‘د…د„دŒ د„خ؟ Arduino sketch خ¸خ± خ»خ¬خ²خµخ¹ د„خ·خ½ خخ½خ´خµخ¹خ¾خ· د„خ·د‚ خ±خ½خ±خ»خ؟خ³خ¹خ؛خ®د‚ د„خ¬دƒخ·د‚ خ؛خ±خ¹ خ¸خ± د„خ· د‡دپخ·دƒخ¹خ¼خ؟د€خ؟خ¹خ®دƒخµخ¹ خ³خ¹خ± خ½خ± د€دپخ؟دƒخ´خ¹خ؟دپخ¯دƒخµخ¹ د„خ؟ د€دŒدƒخ؟ د†د‰د„خµخ¹خ½دŒ خµخ¯خ½خ±خ¹ د„خ؟ خ؛دŒخ؛خ؛خ¹خ½خ؟ LED. خŒدƒخ؟ د€خ¹خ؟ خ´د…خ½خ±د„خ¬ د€خ±د„خ¬د„خµ د„خ؟ FSR, د„دŒدƒخ؟ د€خ¹خ؟ د†د‰د„خµخ¹خ½دŒ خ¸خ± خµخ¯خ½خ±خ¹ د„خ؟ LED! خخ± خ¸د…خ¼خ¬دƒد„خµ دŒد„خ¹ خ· خ»د…د‡خ½خ¯خ± LED د€دپخد€خµخ¹ خ½خ± دƒد…خ½خ´خµخ¸خµخ¯ دƒخµ خخ½خ±خ½ خ±خ؛دپخ؟خ´خخ؛د„خ· PWM خ³خ¹خ± خ½خ± خ»خµخ¹د„خ؟د…دپخ³خ®دƒخµخ¹, د‡دپخ·دƒخ¹خ¼خ؟د€خ؟خ¹دژ د„خ؟خ½ خ±خ؛دپخ؟خ´خخ؛د„خ· 11 دƒخµ خ±د…د„دŒ د„خ؟ د€خ±دپخ¬خ´خµخ¹خ³خ¼خ±.
آ
int fsrAnalogPin = 0; // FSR is connected to analog 0
int LEDpin = 11; // connect Red LED to pin 11 (PWM pin)
int fsrReading; // the analog reading from the FSR resistor divider
int LEDbrightness;
void setup(void) {
Serial.begin(9600); // We'll send debugging information via the Serial monitor
pinMode(LEDpin, OUTPUT);
}
void loop(void) {
fsrReading = analogRead(fsrAnalogPin);
Serial.print("Analog reading = ");
Serial.println(fsrReading);
// we'll need to change the range from the analog reading (0-1023) down to the range
// used by analogWrite (0-255) with map!
LEDbrightness = map(fsrReading, 0, 1023, 0, 255);
// LED gets brighter the harder you press
analogWrite(LEDpin, LEDbrightness);
delay(100);
}
خ‘د€خ»دŒد‚ خ؛دژخ´خ¹خ؛خ±د‚ خ³خ¹خ± خ±خ½خ±خ»خ؟خ³خ¹خ؛خد‚ خ¼خµد„دپخ®دƒخµخ¹د‚ FSR
خ‘خ؛خ؟خ»خ؟د…خ¸خµخ¯ خخ½خ± د€خ±دپخ¬خ´خµخ¹خ³خ¼خ± خ؛دژخ´خ¹خ؛خ± خ³خ¹خ± د„خ· خ¼خد„دپخ·دƒخ· د„خ؟د… FSR دƒخµ خخ½خ± خ±خ½خ±خ»خ؟خ³خ¹خ؛دŒ pin. خ‘د…د„دŒد‚ خ؟ خ؛د‰خ´خ¹خ؛دŒد‚ خ´خµخ½ خ؛خ¬خ½خµخ¹ د…د€خ؟خ»خ؟خ³خ¹دƒخ¼خ؟دچد‚, خ±د€خ»دژد‚ خµخ؛د„د…د€دژخ½خµخ¹ خ±د…د„دŒ د€خ؟د… خµدپخ¼خ·خ½خµدچخµخ¹ د‰د‚ د„خ·خ½ د€خ؟دƒدŒد„خ·د„خ± د€خ¯خµدƒخ·د‚ خ¼خµ د€خ؟خ¹خ؟د„خ¹خ؛دŒ د„دپدŒد€خ؟. خ“خ¹خ± د„خ± د€خµدپخ¹دƒدƒدŒد„خµدپخ± خدپخ³خ±, خ±د…د„دŒ خµخ¯خ½خ±خ¹ خ»خ¯خ³خ؟ د€خ؟خ»دچ د„خ؟ خ¼دŒخ½خ؟ د€خ؟د… د‡دپخµخ¹خ¬خ¶خµد„خ±خ¹!
int fsrPin = 0; // the FSR and 10K pulldown are connected to a0
int fsrReading; // the analog reading from the FSR resistor divider
void setup(void) {
Serial.begin(9600);
}
void loop(void) {
fsrReading = analogRead(fsrPin);
Serial.print("Analog reading = ");
Serial.print(fsrReading);
if (fsrReading < 10) {
Serial.println(" - No pressure");
} else if (fsrReading < 200) {
Serial.println(" - Light touch");
} else if (fsrReading < 500) {
Serial.println(" - Light squeeze");
} else if (fsrReading < 800) {
Serial.println(" - Medium squeeze");
} else {
Serial.println(" - Big squeeze");
}
delay(1000);
}
خ دپخ؟د‡د‰دپخ·خ¼خخ½خ· خ±خ½خ±خ»خ؟خ³خ¹خ؛خ® خ¼خد„دپخ·دƒخ·
خ‘د…د„دŒ د„خ؟ sketch د„خ؟د… Arduino د…د€خ؟خ¸خد„خµخ¹ دŒد„خ¹ خد‡خµد„خµ د„خ؟ FSR خ؛خ±خ»د‰خ´خ¹د‰خ¼خخ½خ؟ دŒد€د‰د‚ د€خ±دپخ±د€خ¬خ½د‰, خ¼خµ 10K خ±خ½د„خ¯دƒد„خ±دƒخ·. Kخ±د„خµخ²خ¬دƒد„خµ د„خ·خ½ د„خ¹خ¼خ® د„خ·د‚ خ±خ½د„خ¯دƒد„خ±دƒخ·د‚ خ؛خ±خ¹ خ؟ خ±خ¹دƒخ¸خ·د„خ®دپخ±د‚ خ´خ¹خ±خ²خ¬خ¶خµد„خ±خ¹ دƒد„خ؟ خ±خ½خ±خ»خ؟خ³خ¹خ؛دŒ pin 0. خ•خ¯خ½خ±خ¹ خ±دپخ؛خµد„خ¬ د€دپخ؟خ·خ³خ¼خخ½خ؟ خ؛خ±خ¹ خ¸خ± خ¼خµد„دپخ®دƒخµخ¹ د„خ·خ½ خ؛خ±د„خ¬ د€دپخ؟دƒخخ³خ³خ¹دƒخ· د„خ· خ´دچخ½خ±خ¼خ· Newton د€خ؟د… خ±دƒخ؛خµخ¯د„خ±خ¹ خ±د€دŒ د„خ؟ FSR. خ‘د…د„دŒ خ¼د€خ؟دپخµخ¯ خ½خ± خµخ¯خ½خ±خ¹ د€خ؟خ»دچ د‡دپخ®دƒخ¹خ¼خ؟ خ³خ¹خ± د„خ· خ²خ±خ¸خ¼خ؟خ½دŒخ¼خ·دƒخ· د„خ·د‚ خ´دچخ½خ±خ¼خ·د‚ د€خ؟د… خ±دƒخ؛خµخ¯د„خ±خ¹ دƒد„خ؟ FSR.
int fsrPin = 0; // the FSR and 10K pulldown are connected to a0
int fsrReading; // the analog reading from the FSR resistor divider
int fsrVoltage; // the analog reading converted to voltage
unsigned long fsrResistance; // The voltage converted to resistance, can be very big so make "long"
unsigned long fsrConductance;
long fsrForce; // Finally, the resistance converted to force
void setup(void) {
Serial.begin(9600); // We'll send debugging information via the Serial monitor
}
void loop(void) {
fsrReading = analogRead(fsrPin);
Serial.print("Analog reading = ");
Serial.println(fsrReading);
// analog voltage reading ranges from about 0 to 1023 which maps to 0V to 5V (= 5000mV)
fsrVoltage = map(fsrReading, 0, 1023, 0, 5000);
Serial.print("Voltage reading in mV = ");
Serial.println(fsrVoltage);
if (fsrVoltage == 0) {
Serial.println("No pressure");
} else {
// The voltage = Vcc * R / (R + FSR) where R = 10K and Vcc = 5V
// so FSR = ((Vcc - V) * R) / V yay math!
fsrResistance = 5000 - fsrVoltage; // fsrVoltage is in millivolts so 5V = 5000mV
fsrResistance *= 10000; // 10K resistor
fsrResistance /= fsrVoltage;
Serial.print("FSR resistance in ohms = ");
Serial.println(fsrResistance);
fsrConductance = 1000000; // we measure in micromhos so
fsrConductance /= fsrResistance;
Serial.print("Conductance in microMhos: ");
Serial.println(fsrConductance);
// Use the two FSR guide graphs to approximate the force
if (fsrConductance <= 1000) {
fsrForce = fsrConductance / 80;
Serial.print("Force in Newtons: ");
Serial.println(fsrForce);
} else {
fsrForce = fsrConductance - 1000;
fsrForce /= 30;
Serial.print("Force in Newtons: ");
Serial.println(fsrForce);
}
}
Serial.println("--------------------");
delay(1000);
}
خ‘خ½خ¬خ³خ½د‰دƒخ· خ¼خµد„دپخ®دƒخµد‰خ½ FSR د‡د‰دپخ¯د‚ خ±خ½خ±خ»خ؟خ³خ¹خ؛خ¬ pins
خ•د€خµخ¹خ´خ® د„خ± FSR خµخ¯خ½خ±خ¹ خ²خ±دƒخ¹خ؛خ¬ خ±خ½د„خ¹دƒد„خ¬دƒخµخ¹د‚, خµخ¯خ½خ±خ¹ خ´د…خ½خ±د„دŒ خ½خ± د„خ± د‡دپخ·دƒخ¹خ¼خ؟د€خ؟خ¹خ®دƒخµد„خµ خ±خ؛دŒخ¼خ± خ؛خ¹ خ±خ½ خ´خµخ½ خد‡خµد„خµ خ±خ½خ±خ»خ؟خ³خ¹خ؛خ¬ pins دƒد„خ؟خ½ خ¼خ¹خ؛دپخ؟خµخ»خµخ³خ؛د„خ® دƒخ±د‚. خں د„دپدŒد€خ؟د‚ د€خ؟د… د„خ؟ خ؛خ¬خ½خ؟د…خ¼خµ خ±د…د„دŒ خµخ¯خ½خ±خ¹ خµخ؛خ¼خµد„خ±خ»خ»خµد…دŒخ¼خµخ½خ؟خ¹ خ¼خ¹خ± خ²خ±دƒخ¹خ؛خ® خ·خ»خµخ؛د„دپخ؟خ½خ¹خ؛خ® خ¹خ´خ¹دŒد„خ·د„خ± د„د‰خ½ خ±خ½د„خ¹دƒد„خ¬دƒخµد‰خ½ خ؛خ±خ¹ د„د‰خ½ د€د…خ؛خ½د‰د„دژخ½. خ‘د€خ؟خ´خµخ¹خ؛خ½دچخµد„خ±خ¹ دŒد„خ¹ خµخ¬خ½ د€خ¬دپخµد„خµ خخ½خ±خ½ د€د…خ؛خ½د‰د„خ® د€خ؟د… خ±دپد‡خ¹خ؛خ¬ خ´خµخ½ خ±د€خ؟خ¸خ·خ؛خµدچخµخ¹ د„خ¬دƒخ· خ؛خ±خ¹ دƒد„خ· دƒد…خ½خد‡خµخ¹خ± د„خ؟خ½ دƒد…خ½خ´خدƒخµد„خµ دƒد„خ·خ½ د„دپخ؟د†خ؟خ´خ؟دƒخ¯خ± خ¼خدƒد‰ خ¼خ¹خ±د‚ خ±خ½د„خ¯دƒد„خ±دƒخ·د‚, خ¸خ± د†خ؟دپد„خ¯دƒخµخ¹ خ¼خد‡دپخ¹ د„خ·خ½ د„خ¬دƒخ· خ¹دƒد‡دچخ؟د‚ خ±دپخ³خ¬. خŒدƒخ؟ خ¼خµخ³خ±خ»دچد„خµدپخ· خµخ¯خ½خ±خ¹ خ· خ±خ½د„خ¯دƒد„خ±دƒخ·, د„دŒدƒخ؟ د€خ¹خ؟ خ±دپخ³دŒ خµخ¯خ½خ±خ¹. خ‘د…د„دŒ دƒد…خ¼خ²خ±خ¯خ½خµخ¹ خµد€خµخ¹خ´خ® خ؟ د€د…خ؛خ½د‰د„خ®د‚ خ»خµخ¹د„خ؟د…دپخ³خµخ¯ دƒخ±خ½ خ؛خ¬خ´خ؟د‚ خ؛خ±خ¹ خ· خ±خ½د„خ¯دƒد„خ±دƒخ· خµخ¯خ½خ±خ¹ دƒخ±خ½ خخ½خ±د‚ خ»خµد€د„دŒد‚ دƒد‰خ»خ®خ½خ±د‚. خ“خ¹خ± خ½خ± خ³خµخ¼خ¯دƒخµد„خµ خخ½خ±خ½ خ؛خ؟د…خ²خ¬ خ¼خµ خخ½خ±خ½ د€خ؟خ»دچ خ»خµد€د„دŒ دƒد‰خ»خ®خ½خ± د‡دپخµخ¹خ¬خ¶خµد„خ±خ¹ خ±دپخ؛خµد„دŒد‚ د‡دپدŒخ½خ؟د‚ دژدƒد„خµ خ½خ± خ؛خ±د„خ±خ»خ¬خ²خµد„خµ د€دŒدƒخ؟ د€خ»خ±د„دچد‚ خµخ¯خ½خ±خ¹ خ؟ دƒد‰خ»خ®خ½خ±د‚ خ¼خµد„دپدژخ½د„خ±د‚ د€دŒدƒخ؟ د‡دپدŒخ½خ؟ د‡دپخµخ¹خ¬خ¶خµد„خ±خ¹ خ³خ¹خ± خ½خ± خ³خµخ¼خ¯دƒخµخ¹ خ؟ خ؛خ¬خ´خ؟د‚ خ¼خد‡دپخ¹ د„خ· خ¼خدƒخ·. خ£خµ خ±د…د„خ®خ½ د„خ·خ½ د€خµدپخ¯د€د„د‰دƒخ·, خ؟ آ«خ؛خ¬خ´خ؟د‚آ» خ¼خ±د‚ خµخ¯خ½خ±خ¹ خخ½خ±د‚ خ؛خµدپخ±خ¼خ¹خ؛دŒد‚ د€د…خ؛خ½د‰د„خ®د‚ 0,1uF. خœد€خ؟دپخµخ¯د„خµ خ½خ± خ±خ»خ»خ¬خ¾خµد„خµ د„خ؟خ½ د€د…خ؛خ½د‰د„خ® دƒد‡خµخ´دŒخ½ خ¼خµ دŒد€خ؟خ¹خ؟خ½ خ¸خخ»خµد„خµ, خ±خ»خ»خ¬ خ¸خ± خ±خ»خ»خ¬خ¾خ؟د…خ½ خ؛خ±خ¹ خ؟خ¹ د„خ¹خ¼خد‚ د‡دپخ؟خ½خ¹دƒخ¼خ؟دچ. خ¤خ؟ 0,1uF د†خ±خ¯خ½خµد„خ±خ¹ خ½خ± خµخ¯خ½خ±خ¹ خخ½خ± خ؛خ±خ»دŒ خ¼خدپخ؟د‚ خ³خ¹خ± خ½خ± خ¾خµخ؛خ¹خ½خ®دƒخµد„خµ خ³خ¹خ± خ±د…د„خ¬ د„خ± FSR.
int fsrPin = 2; // the FSR and cap are connected to pin2
int fsrReading; // the digital reading
int ledPin = 13; // you can just use the 'built in' LED
void setup(void) {
// We'll send debugging information via the Serial monitor
Serial.begin(9600);
pinMode(ledPin, OUTPUT); // have an LED for output
}
void loop(void) {
// read the resistor using the RCtime technique
fsrReading = RCtime(fsrPin);
if (fsrReading == 30000) {
// if we got 30000 that means we 'timed out'
Serial.println("Nothing connected!");
} else {
Serial.print("RCtime reading = ");
Serial.println(fsrReading); // the raw analog reading
// Do a little processing to keep the LED blinking
fsrReading /= 10;
// The more you press, the faster it blinks!
digitalWrite(ledPin, HIGH);
delay(fsrReading);
digitalWrite(ledPin, LOW);
delay(fsrReading);
}
delay(100);
}
// Uses a digital pin to measure a resistor (like an FSR or photocell!)
// We do this by having the resistor feed current into a capacitor and
// counting how long it takes to get to Vcc/2 (for most arduinos, thats 2.5V)
int RCtime(int RCpin) {
int reading = 0; // start with 0
// set the pin to an output and pull to LOW (ground)
pinMode(RCpin, OUTPUT);
digitalWrite(RCpin, LOW);
// Now set the pin to an input and...
pinMode(RCpin, INPUT);
while (digitalRead(RCpin) == LOW) { // count how long it takes to rise up to HIGH
reading++; // increment to keep track of time
if (reading == 30000) {
// if we got this far, the resistance is so high
// its likely that nothing is connected!
break; // leave the loop
}
}
// OK either we maxed out at 30000 or hopefully got a reading, return the count
return reading;
}
