@╬ا╬╣ ╬▓╬╖╬╝╬▒╧╬╣╬║╬┐╬» ╬║╬╣╬╜╬╖╧╬«╧╬╡╧é ╬▒╧╬┐╧╬╡╬╗╬┐╧╬╜╧╬▒╬╣ ╬▒╧╧î ╬ص╬╜╬▒╬╜ ╧╬╡╧╬╣╧â╧╧╬╡╧╧î╬╝╬╡╬╜╬┐ ╧╧î╧╬┐╧╬▒ ╬║╬▒╬╣ ╬▒╧╧î ╧â╧╬▒╬╕╬╡╧╬┐╧╧é ╬╖╬╗╬╡╬║╧╧╬┐╬╝╬▒╬│╬╜╬«╧╬╡╧é. ╬د╧╬╖╧â╬╣╬╝╬┐╧╬┐╬╣╬┐╧╬╜╧╬▒╬╣ ╬▒╧╬┐╬║╬╗╬╡╬╣╧â╧╬╣╬║╬ش ╬▒╧╧î ╧ê╬╖╧╬╣╬▒╬║╬ش ╬║╧à╬║╬╗╧╬╝╬▒╧╬▒ ╬╡╧╬╡╬╣╬┤╬« ╬┐╬┤╬╖╬│╬┐╧╬╜╧╬▒╬╣ ╧╬┐╬╗╧ ╬╡╧╬║╬┐╬╗╬▒ ╬▒╧╧î ╬▒╧à╧╬ش. ╬أ╬╣╬╜╬┐╧╬╜╧╬▒╬╣ ╧â╬╡ ╬▓╬«╬╝╬▒╧╬▒ (steps), ╧î╧╬┐╧╬╡ ╬╡╧╬▒╧╬╝╧î╬╢╬╡╧╬▒╬╣ ╧ê╬╖╧╬╣╬▒╬║╬« ╧╬ش╧â╬╖. ╬ج╬┐ ╧╬╗╬«╬╕╬┐╧é ╬║╬▒╬╣ ╬╖ ╧╬▒╧ç╧╧╬╖╧╬▒ ╧╧ë╬╜ ╬▓╬╖╬╝╬ش╧╧ë╬╜ ╬╡╬╗╬ص╬│╧ç╬┐╧à╬╜ ╧╬╖╬╜ ╬╕╬ص╧â╬╖ ╬║╬▒╬╣ ╧╬╖╬╜ ╧╬▒╧ç╧╧╬╖╧╬▒ ╬▒╬╜╧╬»╧â╧╬┐╬╣╧ç╬▒ ╧╬┐╧à ╬ش╬╛╬┐╬╜╬ش ╧╬┐╧à╧é, ╧╬┐╧à ╧â╧à╬╜╬┤╬ص╬╡╧╬▒╬╣ ╬╝╬╡ ╧╬┐ ╧╧î╧╬┐╧╬▒ ╧╬┐╧à ╬║╬╣╬╜╬╖╧╬«╧╬▒.
╬ا╬╣ ╬▓╬╖╬╝╬▒╧╬╣╬║╬┐╬» ╬║╬╣╬╜╬╖╧╬«╧╬╡╧é ╧ç╧╬╖╧â╬╣╬╝╬┐╧╬┐╬╣╬┐╧╬╜╧╬▒╬╣ ╧î╧╬┐╧à ╬▒╧╬▒╬╣╧╬╡╬»╧╬▒╬╣ ╬▒╬║╧╬╣╬▓╬«╧é ╬ص╬╗╬╡╬│╧ç╬┐╧é ╬╕╬ص╧â╬╖╧é. ╬ù ╬║╬»╬╜╬╖╧â╬« ╧╬┐╧à╧é ╬│╬»╬╜╬╡╧╬▒╬╣ ╬╡╬║╧╬╡╬╗╧╬╜╧╬▒╧é ╧â╧à╬│╬║╬╡╬║╧╬╣╬╝╬ص╬╜╬┐ ╬▒╧╬╣╬╕╬╝╧î ╬▓╬╖╬╝╬ش╧╧ë╬╜. ╬أ╬ش╬╕╬╡ ╬ص╬╜╬▒ ╬▓╬«╬╝╬▒ ╬▒╬╜╧╬╣╧â╧╬┐╬╣╧ç╬╡╬» ╧â╬╡ ╧â╧à╬│╬║╬╡╬║╧╬╣╬╝╬ص╬╜╬╖ ╬│╧ë╬╜╬»╬▒. ╬ث╧à╬╜╬╖╬╕╬╣╧â╬╝╬ص╬╜╬┐╬╣ ╬▓╬╖╬╝╬▒╧╬╣╬║╬┐╬» ╬║╬╣╬╜╬╖╧╬«╧╬╡╧é ╧╬┐╧à ╬╡╬╝╧╬┐╧╬»╬┐╧à ╬╡╬║╧╬╡╬╗╬┐╧╬╜ ╬▓╬«╬╝╬▒ ╬│╧ë╬╜╬»╬▒╧é 1,80, ╬« 7,50, ╬« 150.

╬ّ╬╜ ╬┐╬┤╬╖╬│╬╖╬╕╬╡╬» ╬ص╬╜╬▒╧é ╬▓╬╖╬╝╬▒╧╬╣╬║╧î╧é ╬║╬╣╬╜╬╖╧╬«╧╬▒╧é ╬▓╬«╬╝╬▒╧╬┐╧é 1,80 ╬╜╬▒ ╬╡╬║╧╬╡╬╗╬ص╧â╬╡╬╣ 40 ╬▓╬«╬╝╬▒╧╬▒, ╬┐ ╬ش╬╛╬┐╬╜╬▒╧é ╧╬┐╧à ╬╕╬▒ ╧╬╡╧╬╣╧â╧╧╬▒╧╬╡╬» ╬║╬▒╧╬ش 40*1,8=720. ╬£╬╡╧╬▒╬╛╧ ╧╧ë╬╜ ╬▓╬╖╬╝╬ش╧╧ë╬╜ ╧╬▒╧╬╡╬╝╬▓╬ش╬╗╬╗╬╡╧╬▒╬╣ ╬▒╧╬▒╧╬▒╬»╧╬╖╧╬▒ ╧ç╧╬┐╬╜╬┐╬║╬▒╬╕╧à╧â╧╬ص╧╬╖╧â╬╖. ╬î╧â╬┐ ╬╝╬╣╬║╧╧î╧╬╡╧╬╖ ╬╡╬»╬╜╬▒╬╣ ╬╖ ╧ç╧╬┐╬╜╬┐╬║╬▒╬╕╧à╧â╧╬ص╧╬╖╧â╬╖ ╬▒╧à╧╬« ╧╧î╧â╬┐ ╧╬╣╬┐ ╬│╧╬«╬│╬┐╧╬▒ ╬│╬»╬╜╬╡╧╬▒╬╣ ╬╖ ╬╡╬╜╬▒╬╗╬╗╬▒╬│╬« ╬║╬▒╬╣ ╧╧î╧â╬┐ ╬╝╬╡╬│╬▒╬╗╧╧╬╡╧╬╖ ╬╡╬»╬╜╬▒╬╣ ╬╖ ╧╬▒╧ç╧╧╬╖╧╬▒ ╧╬╡╧╬╣╧â╧╧╬┐╧╬«╧é. ╬ô╬╣╬▒ ╬╜╬▒ ╬▒╬╜╧╬╣╧â╧╧╬▒╧╬╡╬» ╬╖ ╧╬┐╧╬ش ╧╬╡╧╬╣╧â╧╧╬┐╧╬«╧é ╧╬┐╧à ╬║╬╣╬╜╬╖╧╬«╧╬▒ ╬▒╧╬║╬╡╬» ╬╜╬▒ ╬▒╬╜╧╬╣╧â╧╧╬▒╧╬╡╬» ╬╖ ╧â╬╡╬╣╧╬ش ╬╝╬╡ ╧╬╖╬╜ ╬┐╧╬┐╬»╬▒ ╬╡╧╬▒╧╬╝╧î╬╢╬╡╧╬▒╬╣ ╬╖╬╗╬╡╬║╧╧╬╣╬║╬« ╧╬ش╧â╬╖ ╧â╧╬▒ ╬╢╬╡╧╬│╬╖ ╧╧ë╬╜ ╬╖╬╗╬╡╬║╧╧╬┐╬╝╬▒╬│╬╜╬╖╧╧╬╜.
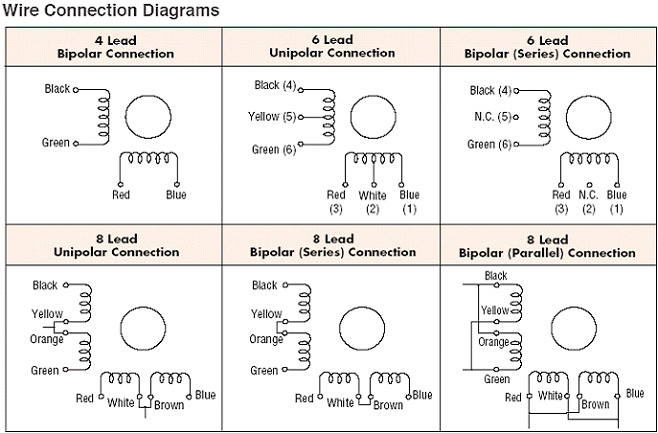
╬ح╧╬ش╧╧ç╬┐╧à╬╜ 2 ╬▓╬▒╧â╬╣╬║╬┐╬» ╧╧╧╬┐╬╣ ╬▓╬╖╬╝╬▒╧╬╣╬║╧╬╜ ╬║╬╣╬╜╬╖╧╬«╧╧ë╬╜. ╬ا╬╣ Bipolar (╬┤╬╣╧╬┐╬╗╬╣╬║╬┐╬») ╬║╬▒╬╣ ╬┐╬╣ Unipolar ╬╝╬┐╬╜╬┐╧╬┐╬╗╬╣╬║╬┐╬».
Bipolar stepper motor: ╬¤╬╣╬▒╬╕╬ص╧╬┐╧à╬╜ 4 ╬║╬▒╬╗╧╬┤╬╣╬▒/╬▒╬│╧ë╬│╬┐╧╧é, ╬┐╬╣ ╬┐╧╬┐╬»╬┐╬╣ ╧╧╬┐╧╬┐╬┤╬┐╧╬┐╧╬╜ ╬▒╬╜╬ش 2 ╬╢╬╡╧╬│╬╖ 4 ╬╖╬╗╬╡╬║╧╧╬┐╬╝╬▒╬│╬╜╬«╧╬╡╧é ╬╡╬╜╬▒╬╗╬╗╬ش╧â╧â╬┐╬╜╧╬▒╧é ╬║╬▒╧╬ش╬╗╬╗╬╖╬╗╬▒ ╧╬╖╬╜ ╧╬┐╬╗╬╣╬║╧î╧╬╖╧╬▒ ╧╬╖╧é ╧╬ش╧â╬╖╧é. ╬ا╬╣ 4 ╬╖╬╗╬╡╬║╧╧╬┐╬╝╬▒╬│╬╜╬«╧╬╡╧é 1a-1b ╬║╬▒╬╣ 2a-2b ╬╡╬»╬╜╬▒╬╣ ╬╡╬║ ╬║╬▒╧╬▒╧â╬║╬╡╧à╬«╧é ╧â╧à╬╜╬┤╬╡╬┤╬╡╬╝╬ص╬╜╬┐╬╣ ╧â╬╡ ╧â╬╡╬╣╧╬ش. ╬ّ╬╜ ╧╧╬┐╧╬┐╬┤╬┐╧╬«╧â╬┐╧à╬╝╬╡ ╧╬┐╧à╧é ╬╖╬╗╬╡╬║╧╧╬┐╬╝╬▒╬│╬╜╬«╧╬╡╧é 4 ╧╬┐╧╬ص╧é ╬┤╬╣╬▒╬┤╬┐╧ç╬╣╬║╬ش ╧â╧╬╝╧╧ë╬╜╬▒ ╬╝╬╡ ╧╬┐╬╜ ╧╬»╬╜╬▒╬║╬▒ ╧╬┐ ╬╝╬▒╬│╬╜╬╖╧╬╣╬║╧î ╬┤╬»╧╬┐╬╗╬┐ ╧â╧╬┐ ╬║╬ص╬╜╧╧╬┐ ╬╕╬▒ ╧╬╡╧╬╣╧â╧╧╬▒╧╬╡╬» ╬║╬▒╧╬ش 4 ╬▓╬«╬╝╬▒╧╬▒ 90 ╬╝╬┐╬╣╧╧╬╜ ╬┤╬╖╬╗╬▒╬┤╬« ╬║╬▒╧╬ش 360 ╬╝╬┐╬»╧╬╡╧é. ╬ّ╬╜╧╬╣╧â╧╧╬┐╧╬« ╬╡╧╬▒╧╬╝╬┐╬│╬«╧é ╬╝╬╡ ╧╬╖ ╧â╬╡╬╣╧╬ش 0001├ب1000├ب0010├ب0100 ╧╧╬┐╬║╬▒╬╗╬╡╬» ╬▒╬╜╧╬╣╧â╧╧╬┐╧╬« ╧╬┐╧╬ش╧é ╬║╬»╬╜╬╖╧â╬╖╧é.
Unipolar stepper motor: ╬¤╬╣╬▒╬╕╬ص╧╬┐╧à╬╜ 5 ╬« 6 ╬║╬▒╬╗╧╬┤╬╣╬▒/╬▒╬│╧ë╬│╬┐╧╧é ╧â╧╬╜╬┤╬╡╧â╬╖╧é ╧╧ë╬╜ ╧╬╡╧â╧â╬ش╧╧ë╬╜ ╬╖╬╗╬╡╬║╧╧╬┐╬╝╬▒╬│╬╜╬╖╧╧╬╜ ╬ّ-╬ّ╬, ╬ْ-╬ْ╬, C-C╬ ╬║╬▒╬╣ D-D ╬╝╬╡ ╧╬╖╬╜ ╧╬ش╧â╬╖ ╧╧╬┐╧╬┐╬┤╬┐╧â╬»╬▒╧é. ╬ج╬▒ 2 ╬▒╧╧î ╧╬▒ 6 ╬║╬▒╬╗╧╬┤╬╣╬▒ ╧╧╬┐╧╬┐╬┤╬┐╧â╬»╬▒╧é ╧â╧à╬╜╬┤╬ص╬┐╬╜╧╬▒╬╣ ╬╝╧î╬╜╬╣╬╝╬▒ ╬╝╬╡ ╧╬┐ - ╧╬╖╧é ╧╧╬┐╧╬┐╬┤╬┐╧â╬»╬▒╧é. ╬ù ╬╕╬╡╧╬╣╬║╬« ╧╬ش╧â╬╖ ╧╧╬┐╧╬┐╬┤╬┐╧â╬»╬▒╧é ╧╬┐╧╬┐╬╕╬╡╧╬╡╬»╧╬▒╬╣ ╬┤╬╣╬▒╬┤╬┐╧ç╬╣╬║╬ش ╧â╬╡ ╬ص╬╜╬▒ ╬▒╧╧î ╧╬▒ 4 ╬║╬▒╬╗╧╬┤╬╣╬▒ ╬│╬╣╬▒ ╬╡╬║╧╬ص╬╗╬╡╧â╬╖ ╧╧ë╬╜ ╬▓╬╖╬╝╬ش╧╧ë╬╜.
╬ـ╧╬▒╧╬╝╧î╬╢╬┐╬╜╧╬▒╧é ╬┤╬╣╬▒╬┤╬┐╧ç╬╣╬║╬ش ╧╬ش╧â╬╖ ╧.╧ç. 5V ╧â╧╬▒ ╧╧à╬╗╬»╬│╬╝╬▒╧╬▒ A-Aظآ, B-Bظآ, C-C ╬║╬▒╬╣ ╧╬ص╬╗╬┐╧é ╧â╧╬▒ D-Dظآ ╬ص╧ç╬┐╧à╬╝╬╡ 4 ╬▓╬«╬╝╬▒╧╬▒ ╬« steps (╧â╧╬┐ ╧╬▒╧╬ش╧╬╗╬╡╧à╧╬┐ ╧â╧ç╬«╬╝╬▒ ╧╧ë╬╜ 4╬د150 =600). ╬ْ╬╗╬ص╧╬┐╧à╬╝╬╡, ╧î╧╬╣ ╬╡╬┤╧ ╬┤╬╡╬╜ ╬ص╧ç╬┐╧à╬╝╬╡ ╬╡╬╜╬▒╬╗╬╗╬▒╬│╬ص╧é ╧╬┐╧à +5V ╬║╬▒╬╣ 0V ╧â╧╬▒ ╬»╬┤╬╣╬▒ ╬║╬▒╬╗╧╬┤╬╣╬▒ ╧î╧╧ë╧é ╧â╧╬┐ ╬┤╬╣╧╬┐╬╗╬╣╬║╧î ╬▓╬╖╬╝╬▒╧╬╣╬║╧î ╬║╬╣╬╜╬╖╧╬«╧╬▒.
╬ث╧╬│╬║╧╬╣╧â╬╖ ╬╝╬┐╬╜╬┐╧╬┐╬╗╬╣╬║╧╬╜ ╬║╬▒╬╣ ╬┤╬╣╧╬┐╬╗╬╣╬║╧╬╜ ╬║╬╣╬╜╬╖╧╬«╧╧ë╬╜
╬ù ╬╡╧╬╣╬╗╬┐╬│╬« ╬╝╬╡╧╬▒╬╛╧ ╧╬╖╧é ╧ç╧╬«╧â╬╖╧é ╬╡╬╜╧î╧é ╬╝╬┐╬╜╬┐╧╬┐╬╗╬╣╬║╬┐╧ ╬« ╬┤╬╣╧╬┐╬╗╬╣╬║╬┐╧ ╬║╬╣╬╜╬╖╧╬«╧╬▒ ╬╡╬╛╬▒╧╧╬ش╧╬▒╬╣ ╬▒╧╧î ╧╬╖╬╜ ╬▒╧╬╗╧î╧╬╖╧╬▒ ╧╬┐╧à ╬║╧à╬║╬╗╧╬╝╬▒╧╬┐╧é ╬┐╬┤╬«╬│╬╖╧â╬╖╧é ╧╬╖ ╧╬┐╧╬« ╬║╬▒╬╣ ╬▒╧╧î ╧╬╖╬╜ ╬▒╧╧î╬┤╬┐╧â╬╖ ╬╣╧â╧ç╧╬┐╧é. ╬ا╬╣ ╬┤╬╣╧╬┐╬╗╬╣╬║╬┐╬» ╬║╬╣╬╜╬╖╧╬«╧╬╡╧é ╬┤╬»╬┤╬┐╧à╬╜ ╧╬╡╧╬» ╧╬┐ 30% ╬╝╬╡╬│╬▒╬╗╧╧╬╡╧╬╖ ╧╬┐╧╬« ╬▒╧╧î ╧╬┐╧à╧é ╬╝╬┐╬╜╬┐╧╬┐╬╗╬╣╬║╬┐╧╧é ╧╬┐╧à ╬»╬┤╬╣╬┐╧à ╬╝╬╡╬│╬ص╬╕╬┐╧à╧é. ╬ّ╧à╧╧î ╬┐╧╬╡╬»╬╗╬╡╧╬▒╬╣ ╧â╧╬┐ ╧î╧╬╣ ╧â╧╬┐╧à╧é ╬╝╬┐╬╜╬┐╧╬┐╬╗╬╣╬║╬┐╧╧é ╬║╬╣╬╜╬╖╧╬«╧╬╡╧é ╬╡╬╜╬╡╧╬│╬┐╧╬┐╬╣╬╡╬»╧╬▒╬╣ ╬║╬ش╬╕╬╡ ╧╬┐╧╬ش ╬╝╧î╬╜╬┐ ╧╬┐ ╬╝╬╣╧â╧î ╧╧╬╗╬╣╬│╬╝╬▒. ╬ّ╬╜╧╬»╬╕╬╡╧╬▒ ╬ص╬╜╬▒╧é ╬┤╬╣╧╬┐╬╗╬╣╬║╧î╧é ╬║╬╣╬╜╬╖╧╬«╧╬▒╧é ╬╡╬╜╬╡╧╬│╬┐╧╬┐╬╣╬╡╬»╧╬▒╬╣ ╬║╬ش╬╕╬╡ ╧╬┐╧╬ش ╬┐╬╗╧î╬║╬╗╬╖╧╬┐ ╧╬┐ ╧╧╬╗╬╣╬│╬╝╬▒.
╬ب╬╗╬╡╬┐╬╜╬╡╬║╧╬«╬╝╬▒╧╬▒ ╧╧ë╬╜ ╬▓╬╖╬╝╬▒╧╬╣╬║╧╬╜ ╬║╬╣╬╜╬╖╧╬«╧╧ë╬╜: ╬ا ╬ص╬╗╬╡╬│╧ç╬┐╧é ╬╡╬»╬╜╬▒╬╣ ╧â╧ç╬╡╧╬╣╬║╬ش ╬╡╧╬║╬┐╬╗╬┐╧é. ╬ث╧╬▒╬╝╬▒╧╬ش╬╜╬╡ ╬▒╬║╬▒╧╬╣╬▒╬»╬▒ ╬▒╬╜ ╬┤╬╡╬╜ ╬╡╧╬▒╧╬╝╬┐╧â╧╬╡╬» ╧╬▒╬╗╬╝╧î╧é. ╬ث╧╬╣╧é ╬╝╬╣╬║╧╬ص╧é ╧╬▒╧ç╧╧╬╖╧╬╡╧é ╧╬╡╧╬╣╧â╧╧╬┐╧╬«╧é, ╬▒╬╗╬╗╬ش ╬║╬▒╬╣ ╬║╬▒╧╬ش ╧╬╖╬╜ ╬╡╬║╬║╬»╬╜╬╖╧â╬« ╧╬┐╧à╧é ╧╬▒╧╬ش╬│╬┐╧à╬╜ ╧â╧ç╬╡╧╬╣╬║╬ش ╬╝╬╡╬│╬ش╬╗╬╖ ╧╬┐╧╬«.
╬£╬╡╬╣╬┐╬╜╬╡╬║╧╬«╬╝╬▒╧╬▒: ╬ء╬┐╧╧à╬▓╧╬┤╬╖╧é ╬╗╬╡╬╣╧╬┐╧à╧╬│╬»╬▒, ╬╝╬╣╬║╧╧î╧é ╬▓╬▒╬╕╬╝╧î╧é ╬▒╧╧î╬┤╬┐╧â╬╖╧é, ╧â╧à╬│╬║╧╬╣╬╜╧î╬╝╬╡╬╜╬┐╬╣ ╬╝╬╡ ╧╬┐╧à╧é DC ╬ص╧ç╬┐╧à╬╜ ╧╬╡╧╬╣╬┐╧╬╣╧â╬╝╬ص╬╜╬╖ ╧╬▒╧ç╧╧╬╖╧╬▒ ╬║╬▒╬╣ ╧╬┐╧╬«, ╧â╧ç╬╡╧╬╣╬║╬ش ╬▒╬║╧╬╣╬▓╬┐╬», ╧╬╣╬┐ ╬┐╬│╬║╧╬┤╬╡╬╣╧é. ╬ô╬╡╬╜╬╣╬║╬ش, ╬┐╬╣ ╬▓╬╖╬╝╬▒╧╬╣╬║╬┐╬» ╬║╬╣╬╜╬╖╧╬«╧╬╡╧é ╬╡╬»╬╜╬▒╬╣ ╧â╧à╬╜╬«╬╕╧ë╧é ╬╝╬╣╬║╧╧î╧╬╡╧╬╖╧é ╬╣╧â╧ç╧╬┐╧é ╬▒╧╧î ╬ص╬╜╬▒╬╜ ╬»╧╧╬┐ (1hp=746 W) ╬║╬▒╬╣ ╬ص╧╧â╬╣ ╧ç╧╬╖╧â╬╣╬╝╬┐╧╬┐╬╣╬┐╧╬╜╧╬▒╬╣ ╬╝╧î╬╜╬┐ ╧â╬╡ ╬╡╧╬▒╧╬╝╬┐╬│╬ص╧é ╬╡╬╗╬ص╬│╧ç╬┐╧à ╬╕╬ص╧â╬╖╧é ╧ç╬▒╬╝╬╖╬╗╬«╧é ╬╣╧â╧ç╧╬┐╧é.
╬ة╬┐╧╬«
╬£╬╡╧╧╬╣╬ص╧╬▒╬╣ ╧â╬╡ N*m (Newton meters). E╬»╬╜╬▒╬╣ ╬╖ ╧╬┐╧╬« ╧╬┐╧à ╧╬▒╧╬ش╬│╬╡╬╣ ╬┐ ╬║╬╣╬╜╬╖╧╬«╧╬▒╧é ╧â╧╬╣╧é ╬┤╬╣╬ش╧╬┐╧╬╡╧é ╧╬▒╧ç╧╧╬╖╧╬╡╧é ╧╬╡╧╬╣╧â╧╧╬┐╧╬«╧é ╧╬┐╧à. ╬ù ╬╝╬ص╬│╬╣╧â╧╬╖ ╧╬╣╬╝╬« ╧╬┐╧╬«╧é ╬║╬ش╬╕╬╡ ╬║╬╣╬╜╬╖╧╬«╧╬▒, ╧╬┐╧à ╬┐╬╜╬┐╬╝╬ش╬╢╬╡╧╬▒╬╣ ╧╬┐╧╬« ╬▒╬║╬╣╬╜╬╖╧╬┐╧╬┐╬»╬╖╧â╬╖╧é, ╬╡╬»╬╜╬▒╬╣ ╬╖ ╧╬┐╧╬« ╧╬┐╧à ╧╬▒╧╬ش╬│╬╡╬╣ ╧î╧╬▒╬╜ ╧╬┐ ╧╬┐╧╧╬»╬┐ ╧╬┐╧à ╬▒╬╜╧╬╣╬╝╬╡╧╧ë╧╬»╬╢╬╡╬╣ ╬╡╬»╬╜╬▒╬╣ ╧╧î╧â╬┐ ╬╝╬╡╬│╬ش╬╗╬┐, ╧╧â╧╬╡ ╬╜╬▒ ╧╬┐╬╜ ╬▒╬║╬╣╬╜╬╖╧╬┐╧╬┐╬╣╬╡╬». ╬ù ╧╬┐╧╬« ╧╬┐╧à ╬▒╬╜╬▒╧╧╧╧â╧â╬╡╧╬▒╬╣ ╧î╧╬▒╬╜ ╬┐ ╧╧î╧╬┐╧╬▒╧é ╬╡╬╜╧î╧é stepper motor ╬╝╬╡╧╬▒╬║╬╣╬╜╬╡╬»╧╬▒╬╣ ╬║╬▒╧╬ش ╬ص╬╜╬▒ ╬▓╬«╬╝╬▒ ╬┐╬╜╬┐╬╝╬ش╬╢╬╡╧╬▒╬╣ ╧╬┐╧╬« ╬╝╬╡╧╬▒╬║╬»╬╜╬╖╧â╬╖╧é.
